- اولین مرجع آموزش رآس در ایران
- info@iranros.com

اکتبر 10, 2019
Author : Lentin Joseph
publication date: 2018
Level : Basic
اکتبر 10, 2019
اکتبر 10, 2019

اکتبر 9, 2019
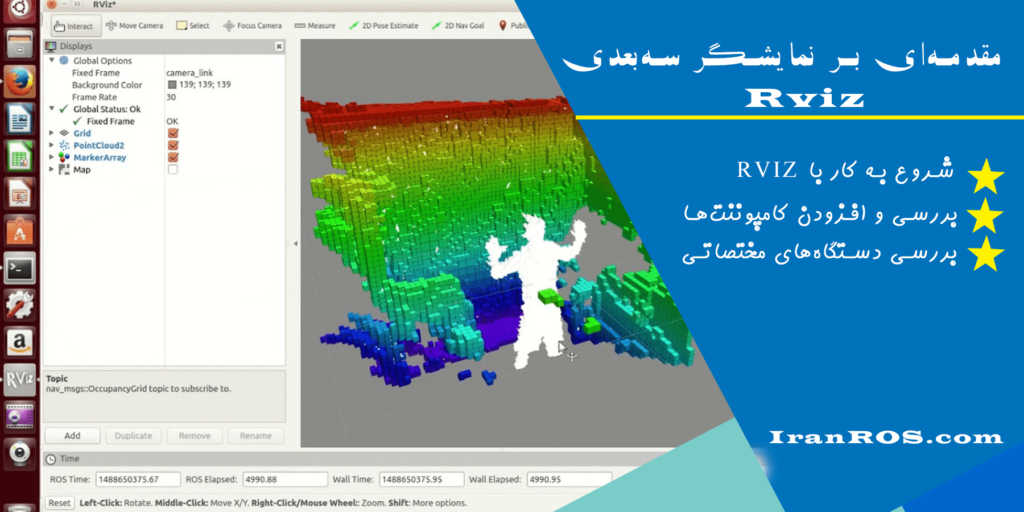
RVIZ (ROS visualization) یک نمایشگر سه بعدی برای نمایش دیتاهای سنسورها و وضعیت قرارگیری ربات با توجه به اطلاعات ROS است. به کمک Rviz شما می توانید مدل ربات واقعی خود را ایجاد نمایید و وضعیت آن را در نمایشگر ببینید.
آوریل 5, 2019
اشتراک گذاری و یا انتقال فایل بین ویندوز VM (ماشین مجازی – VMware®Workstation 12) یا همان انتقال فایل بین windows و vmware و اشتراک گذاری پوشه در vmware و یا کپی کردن فایل به vmware در این بخش توسط یک ویدئوی آموزشی ارائه شده است.
آوریل 5, 2019
آموزش راه اندازی و تنظیمات اولیه اوبونتو (Ubuntu) جهت کار با ROS در این بخش توضیح داده میشه. اغلب افراد تازه کار با ROS ممکن هست که با Ubuntu کار نکرده باشند. به صورت خلاصه نحوه اضافه کردن زبان فارسی و ایجاد شورتکات برای اون رو توضیح میدیم.
آوریل 1, 2019
با توجه به مشکلاتی که ممکن است در حین نصب همزمان سیستم عامل اوبونتو در کنار ویندوز ۱۰ پیش بیاید،بهتر است که ابونتو را بر روی یک VMWare نصب نمایند. در این آموزش به بررسی نحوهی نصب این سیستم عامل به صورت یک فایل ویدئویی پرداخته شده است
ژانویه 31, 2019

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
در این آموزش با نحوه ارسال و دریافت پیام به زبان ++C و نوشتن نود انتشاردهنده و شنونده آشنا میشوید.