


نصب ROS بر روی ویندوز ۱۰
نصب ROS بر روی ویندوز ۱۰ قابلیت جدیدی است که به نسخه جدید ویندوز ۱۰ اضافه شده است. در واقع یک ساب سیستم در ویندوز برای لینوکس (WSL) اضافه شده است. این ساب سیستم یک لایه است که به شما امکان می دهد مجموعه ای از باینری های لینوکس را بر روی ویندوز ۱۰ اجرا کنید.
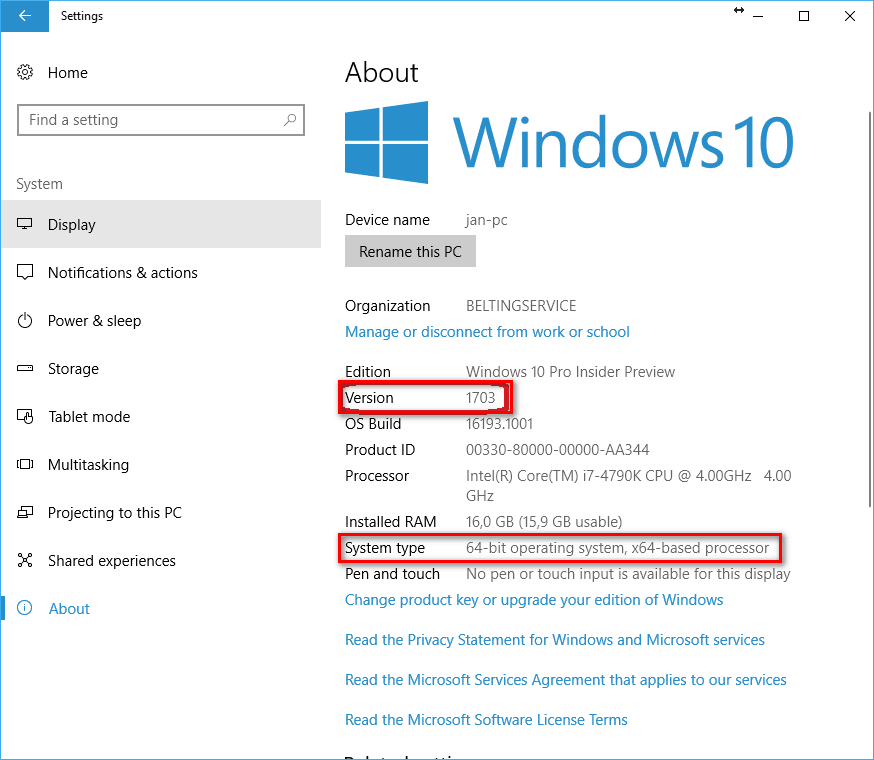
با ظهور بروزرسانی Creators Windows 10 در مارس ۲۰۱۷ ، WSL به شدت به روز شد و اکنون قادر است ROS را بر روی ویندوز نصب نمایید. به عنوان نمونه توزیع Melodic (ملودیک) را در این آموزش نصب و سپس اجرا خواهیم کرد.
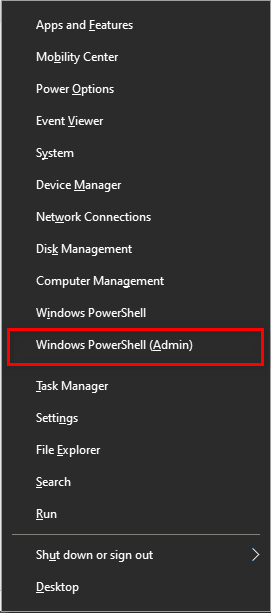
در این آموزش نحوه نصب WSL و راه اندازی ROS را برای شما نشان خواهیم داد.

{kind=link}
{kind=link}