
شبیهساز Gazebo
گزبو Gazebo شبیهسازی ربات ابزاری اساسی در هر نرمافزار رباتیک است. یک شبیهساز خوب، امکان آزمایش سریع الگوریتمها ، طراحی رباتها ، انجام تست رگرسیون و آموزش هوشمصنوعی را با استفاده از سناریوهای واقعگرایانه فراهم میآورد. Gazebo با دراختیار داشتن این قابلیتها، امکان شبیهسازی دقیق و کارآمد انواع رباتها در محیطهای پیچیده داخلی و خارجی را فراهم میکند.
خلاصه اینکه یک موتور فیزیک قوی ، گرافیک باکیفیت بالا و رابطهای مناسب برنامهنویسی و گرافیکی در Gazebo در اختیار شما قرار دارد تا ربات خودتان را با شرایطی نزدیک به واقعیت مدلسازی و تست کنید. از همه بهتر اینکه ، Gazebo کاملاً رایگان بوده و یک جامعه از کاربران پرجنبوجوش را در اختیار دارد که همواره در تلاشند تا آن را ارتقا دهند و مشکلات احتمالی آن را رفع کنند. [۱]
گزبو امکانات متنوعی برای رفتارهای فیزیکی گوناگون دارد. شبیهساز گزبو از دو بخش تشکیل شده است: یک سرور (که با عنوان gzserver اجرا میشود) و یک کلاینت (client) (که با عنوان gzclient اجرا میشود). gzserver در واقع هسته مرکزی گزبو بوده و محاسبات فیزیکی و تولید دادههای سنسورها را برعهده دارد و در مواردی که نیاز به رابط کاربری نیست میتواند به صورت مستقل اجرا شود. عملکرد بخش کلاینت نیز بهصورت ارائه یک نمایش گرافیکی رابط کاربری است که میتواند تجسم خوبی از شبیهسازی و کنترل راحت بر روی خواص مختلف شبیه سازی را فراهم کند.
یک قابلیت مؤثر و باارزش گزبو این است که گزبو میتواند سنسورهایی نظیر سنسورهای نیرو، شتاب سنج، سونار، LIDARs، دوربینهای رنگی، و سنسورهای ابر نقاط را شبیهسازی کند، در نتیجه شما قادر خواهید بود تا در شبیهسازی خودتان به راحتی سنسورهای مورد نیاز را به مدلتان اضافه کنید و خروجیهایی نزدیک به خروجی سنسورهای واقعی را از آن انتظار داشته باشید.
[۱] برگرفته از سایت رسمی گزبو http://gazebosim.org/
نصب گزبو Gazebo
در صورتیکه شما طبق آموزش نصب رآس، از گزینه نصب کامل استفاده کرده باشید، ورژن۷ گزبو به صورت خودکار بر روی سیستم شما نصب شده است. در غیر اینصورت میتوانید تنها با یک دستور آخرین ورژن گزبو را نصب کنید.
[sourcecode language=”plain”]
curl -sSL http://get.gazebosim.org | sh
[/sourcecode]
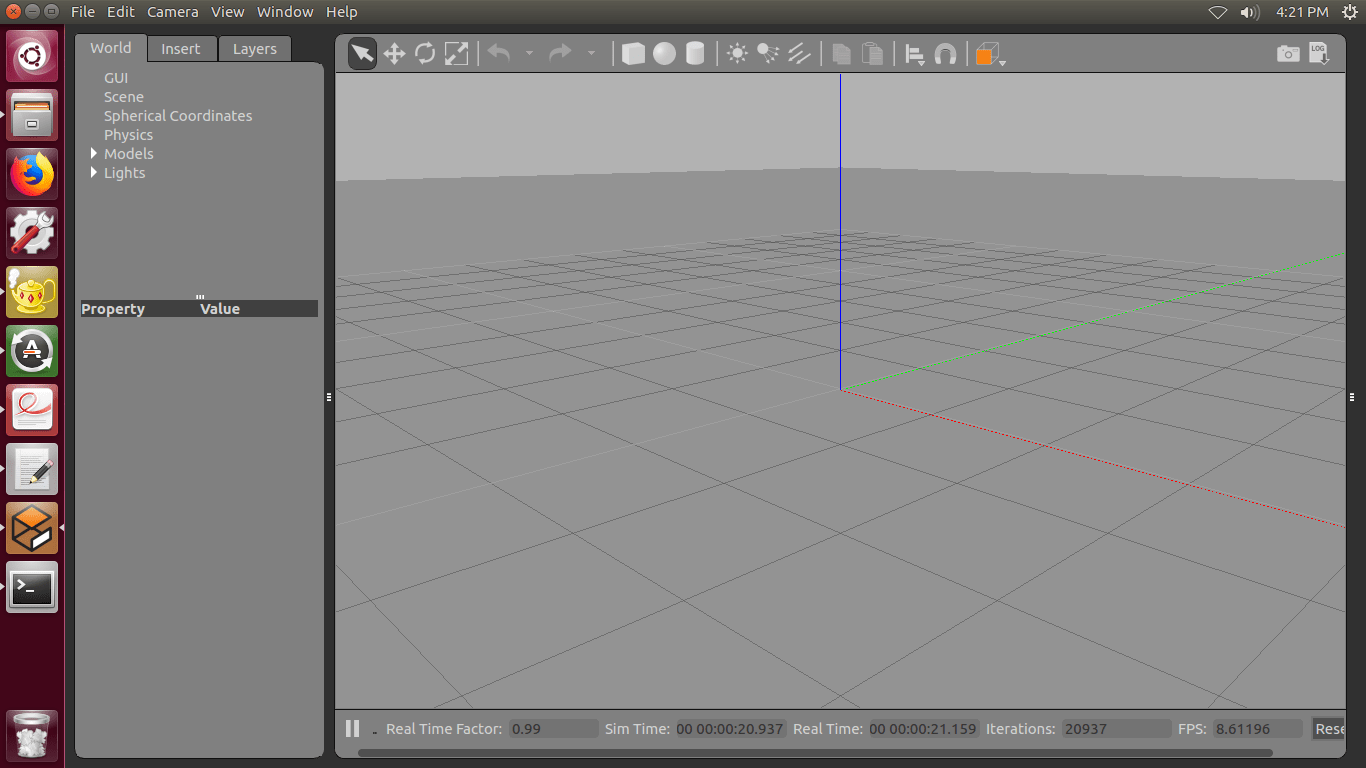
در صورتی که در ترمینال دستور زیر را وارد کنید گزبو فرارخوانی میشود و اگر درست نصب شده باشد محیط کاری آن را مشاهده خواهید کرد.
[sourcecode language=”plain”]
gazebo
[/sourcecode]