- اولین مرجع آموزش رآس در ایران
- info@iranros.com

سپتامبر 19, 2019
در بخش آموزش مقدماتی نحوه ساخت پکیج با استفاده از دستور catkin_create_pkg را یاد گرفتید. اما خوب است بدانید که امکان ساخت پکیج به صورتی دستی هم وجود دارد و کار دشواری نیست. اما بد نیست که با نحوه ساخت یک پکیج آشنا شوید.
سپتامبر 19, 2019
در بعضی از مواقع بستههای ROS به کتابخانههای خارجی و ابزارهایی نیاز دارند که باید توسط سیستم عامل ارائه شوند. این کتابخانه ها و ابزارهای مورد نیاز معمولاً به عنوان وابستگیهای سیستم شناخته می شوند. مثلاً میتوان به roscpp و std_msgs اشاره کرد.
سپتامبر 19, 2019

در این آموزش نحوه تعریف انواع پیامهای سفارشی به روش توصیف پیام در ROS ارائه میشود. در این راستا نحوه واردکردن پیامها
در C++ و پایتون و تعریف وابستگیها مورد بررسی قرار میگیرد.
اکتبر 9, 2019
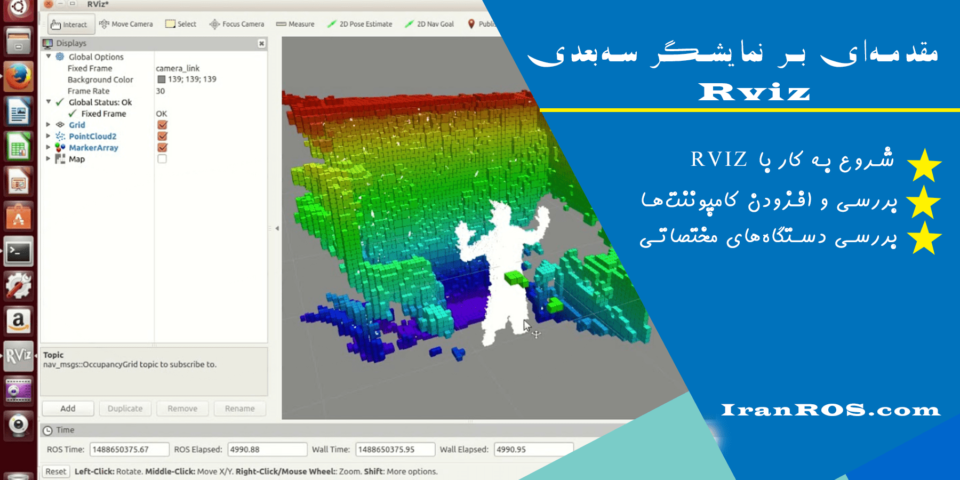
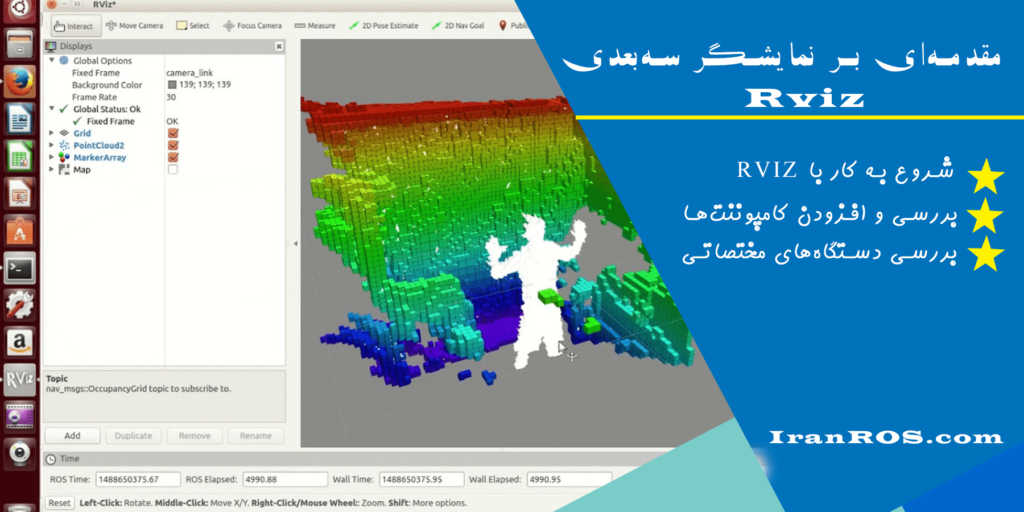
RVIZ (ROS visualization) یک نمایشگر سه بعدی برای نمایش دیتاهای سنسورها و وضعیت قرارگیری ربات با توجه به اطلاعات ROS است. به کمک Rviz شما می توانید مدل ربات واقعی خود را ایجاد نمایید و وضعیت آن را در نمایشگر ببینید.
اکتبر 23, 2019

گزبو نرمافزار شبیهسازی در ROS است که امکان آزمایش سریع الگوریتمها ، طراحی رباتها، انجام تست رگرسیون، آموزش هوشمصنوعی با استفاده از سناریوهای واقعگرایانه، امکان شبیهسازی دقیق و کارآمد انواع رباتها در محیطهای پیچیده داخلی و خارجی را فراهم میکند.
اکتبر 26, 2019
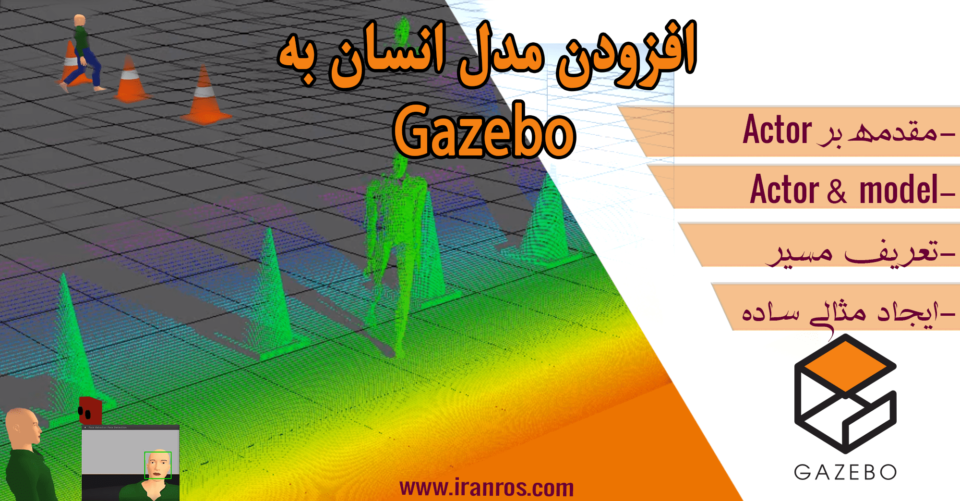
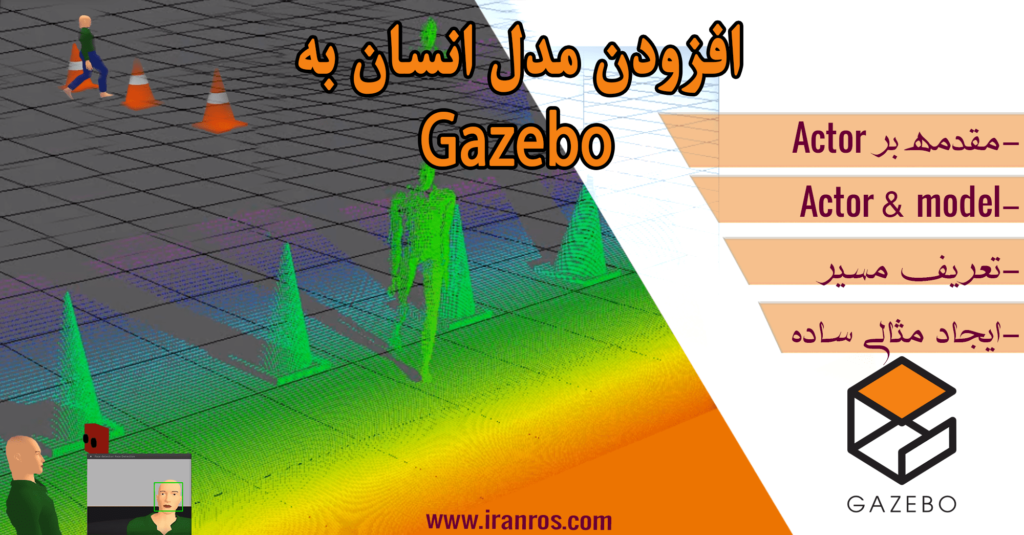
در صورتی که بخواهید یک انسان در مسیر تعیین شدهای حرکت کند. البته بدون اینکه تحت تاثیر موتور فیزیک موجود در گزبو قرار گیرد. یعنی گرانش تاثیری بر آن نداشته باشد و یا برخورد با اشیا دیگر برای آن تعریف نشود. به شما پیشنهاد میکنیم این مقاله را بخوانید.
اکتبر 27, 2019
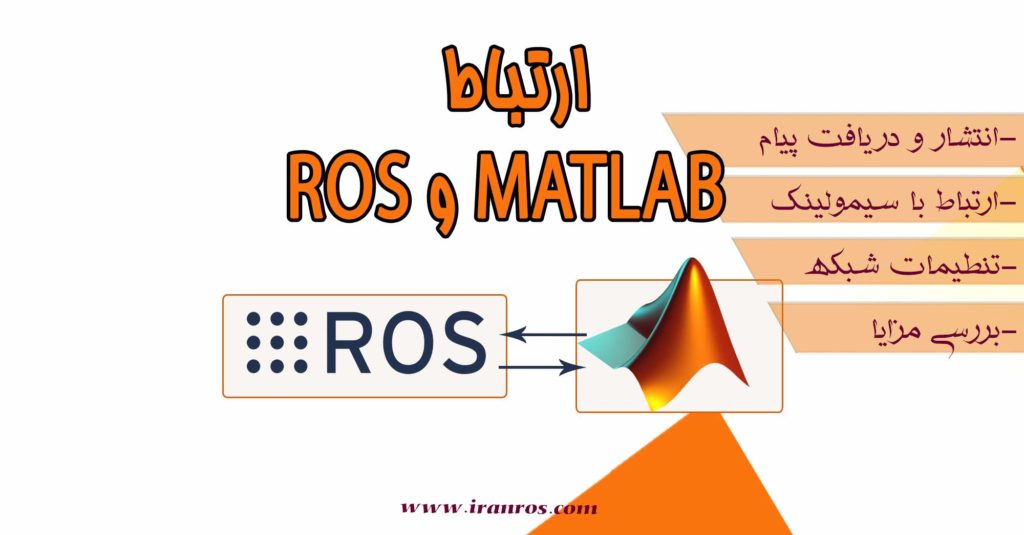
در این آموزش نحوه ارتباط بین MATLAB و ROS آموزش داده میشود. تنظیمات شبکه برای برقراری ارتباط، دریافت و انتشار تاپیکها در متلب، کنترل ربات توسط سیمولینک و ... مواردی است که در این آموزش ارائه شده است.
نوامبر 3, 2019
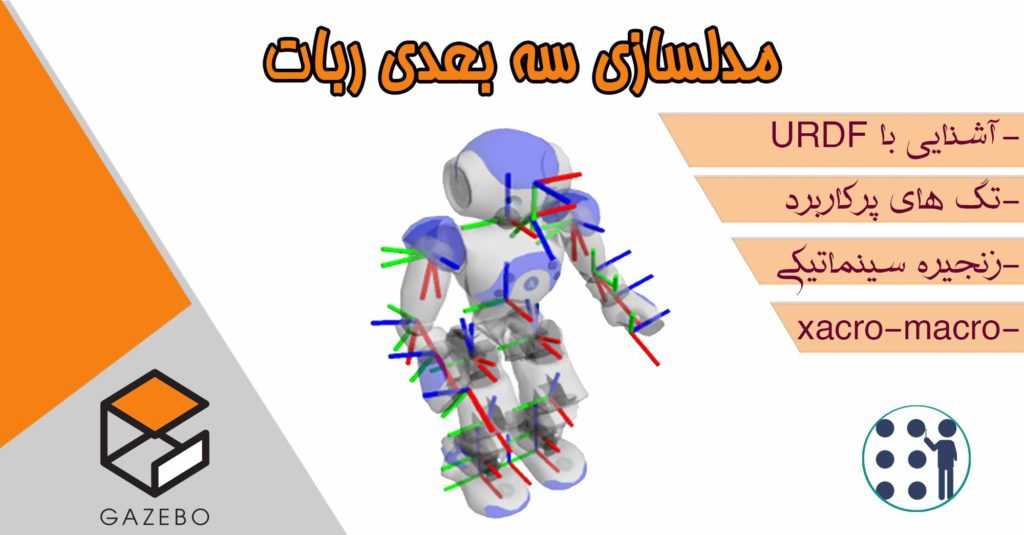
برای طراحی و ساخت مدل سهبعدی ربات، رآس که به ما کمک میکنند تا یک مدل سهبعدی از ربات را با تطبیق خوبی با واقعیت ایجاد کنیم.همچنین رآس این امکان را به ما میدهد تا فایل CAD طراحی شده برای اجزای ربات خودمان را نیز به آن بدهیم تا در نمایش گرافیکی شبیهسازی از آن استفاده کند.
فوریه 19, 2020
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
وصیف کامل یک ربات نسبتاً پیچیده با استفاده از urdf کار دشوار و خسته کنندهای است. خوشبختانه ROS این امکان را ایجاد کرده است تا شما با استفاده از پکیج xacro برای سادهتر کردن کدهای خود بهره ببرید. به طور کلی به کمک xacro میتوان سه کار مفید زیر را انجام داد:
تعریف ثابتها
محاسبات ساده ریاضی
تعریف ماکرو