- اولین مرجع آموزش رآس در ایران
- info@iranros.com

ژانویه 22, 2020
{kind=link}
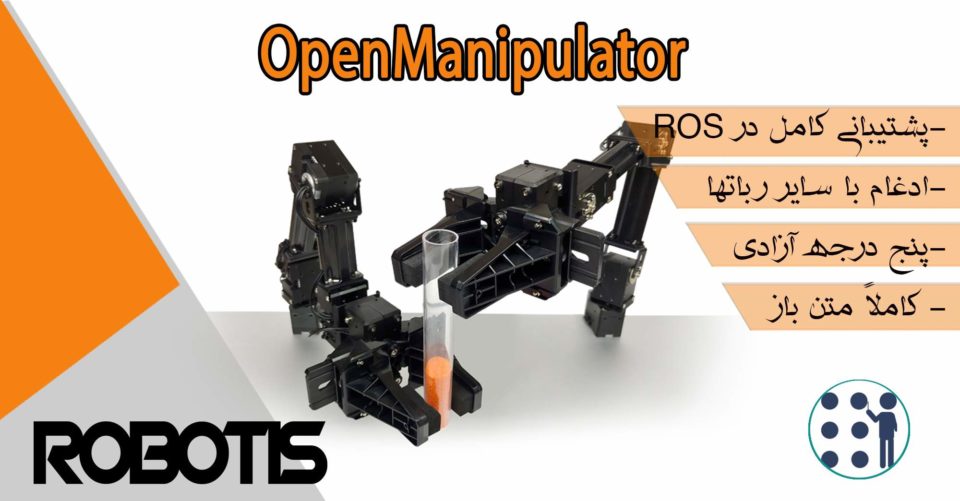
Open manipulator یک بازوی رباتیک با مفاصل دورانی و دارای 5 درجه آزادی (4 مفصل دورانی+ 1 گریپر) است که کاملاً با ROS سازگار بوده و شما میتوانید به آسانی آن را در محیط شبیهسازی اجرا کنید و الگوریتمهای مدنظر خودتان را بر روی آن پیادهسازی کنید.