- اولین مرجع آموزش رآس در ایران
- info@iranros.com



فوریه 19, 2020
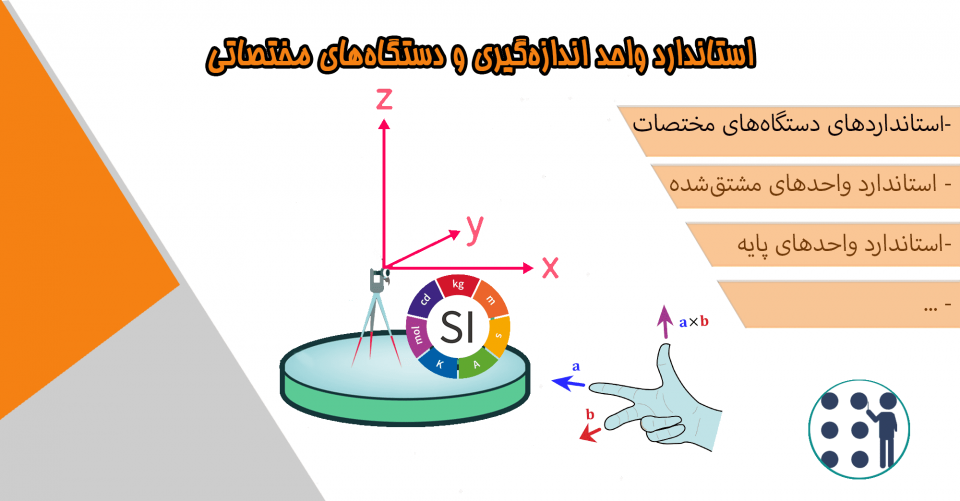
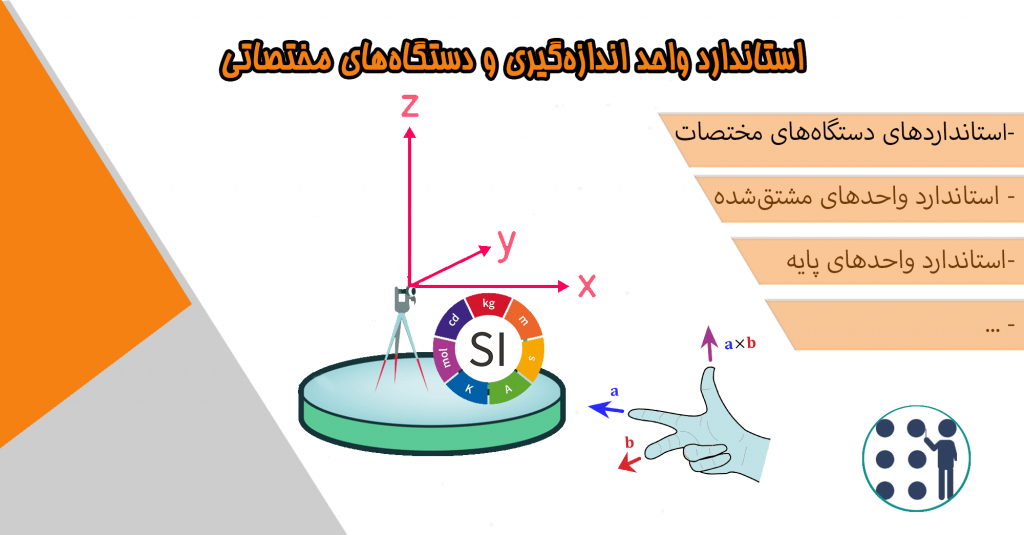
واحد اندازهگیری و دستگاه های مختصاتی برای استفاده در ROS مورد بررسی قرار میگیرد. واحدهای اصلی مشتق شده دستگاههای مختصاتی جهت محورها سایر استانداردها رآس

دسامبر 3, 2019
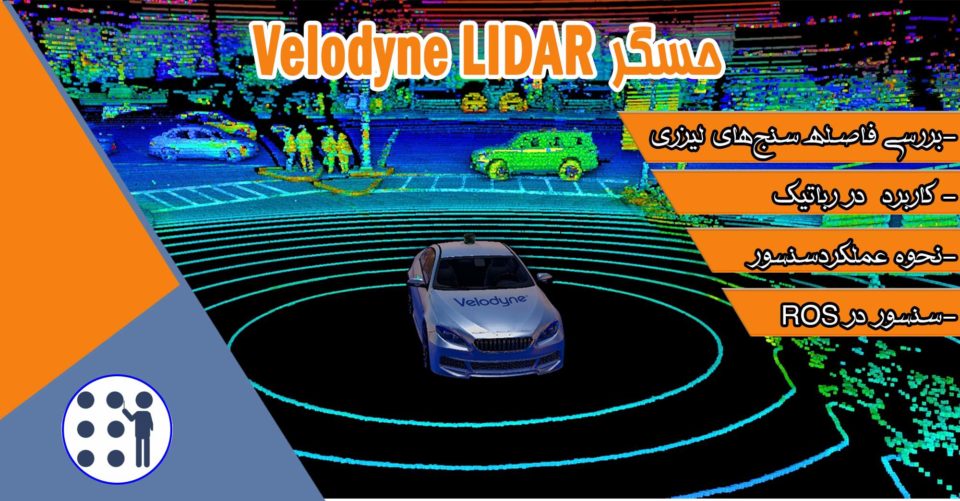
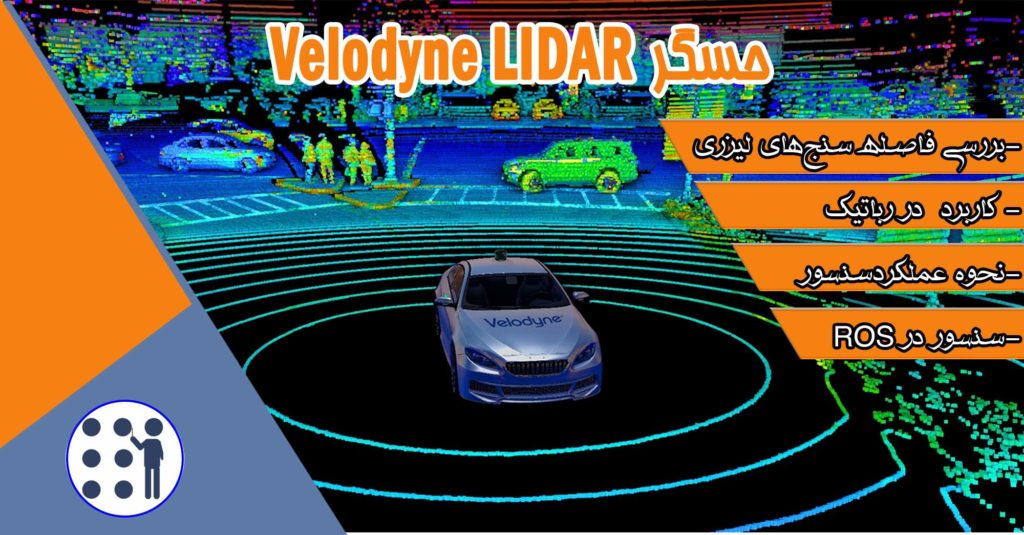
حسگر (سنسور) Velodyne LIDAR در این مقاله به صورت کامل مورد بررسی قرار میگیرد. برای این منظور ویژگی های اصلی، کاربرد حسگر لیدار ، فاصله کارکرد، دقت، صحت، میزان FOV در حالت افقی و عمودی، رزولوشن، نرخ بروزرسانی، ولتاژ کاری و ... به تشریح بیان میشود. همچنین نحوه کار با این سنسور در ROS نیز بررسی می شود.
اکتبر 26, 2019
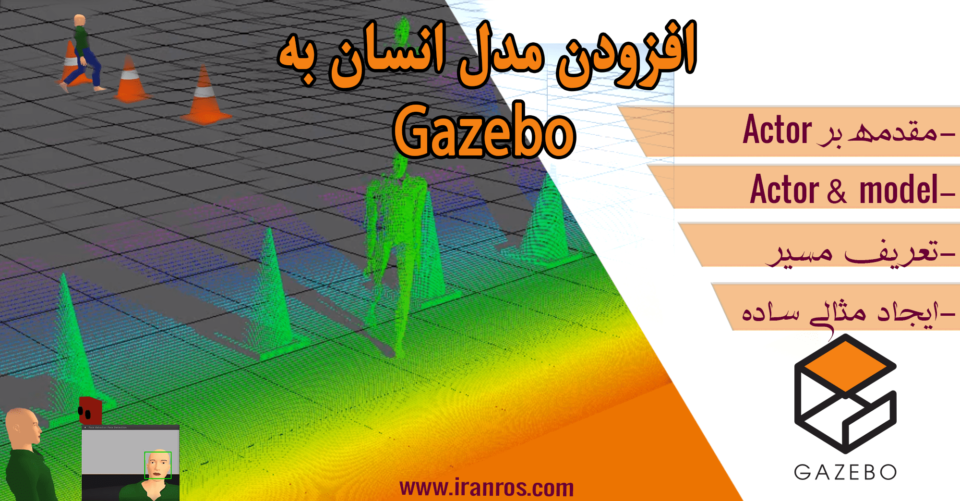
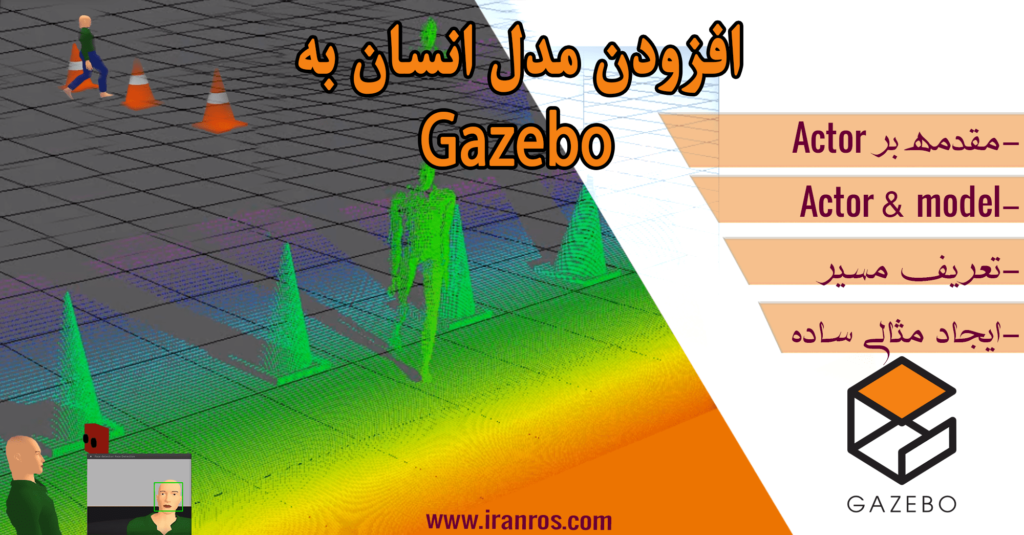
در صورتی که بخواهید یک انسان در مسیر تعیین شدهای حرکت کند. البته بدون اینکه تحت تاثیر موتور فیزیک موجود در گزبو قرار گیرد. یعنی گرانش تاثیری بر آن نداشته باشد و یا برخورد با اشیا دیگر برای آن تعریف نشود. به شما پیشنهاد میکنیم این مقاله را بخوانید.
اکتبر 11, 2019
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
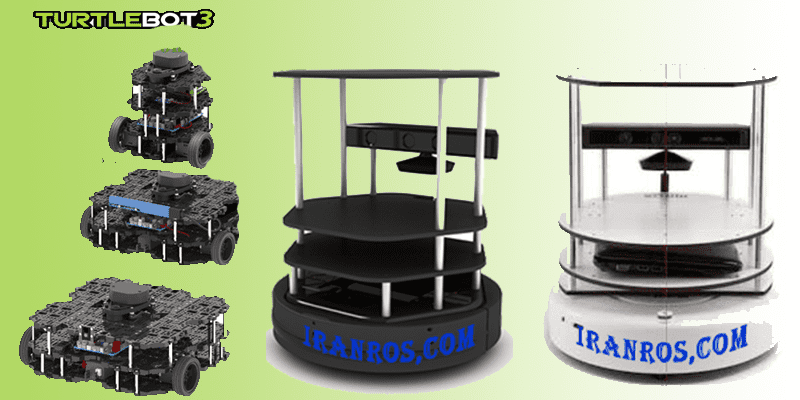
ربات لاکپشتی، یک ربات موبایل نسل جدید است که ماژولار ، جمع و جور و قابل تنظیم است. کیت TurtleBot شامل سنسور فاصله ۲D / 3D ، کامپیوتر تک بُردی SBC (Single Board Computer) و کیت سخت افزاری نصب TurtleBot است.