- اولین مرجع آموزش رآس در ایران
- info@iranros.com

ژوئن 10, 2021

فزونه ها به شما امکان می دهند مدل ها ، حسگرها ، خصوصیات جهان و حتی نحوه اجرای Gazebo را کنترل کنید. در این آموزش نحوه ایجاد و بارگذاری افزونه ها برای اهداف مختلف توضیح داده شده است.
فوریه 19, 2020
وصیف کامل یک ربات نسبتاً پیچیده با استفاده از urdf کار دشوار و خسته کنندهای است. خوشبختانه ROS این امکان را ایجاد کرده است تا شما با استفاده از پکیج xacro برای سادهتر کردن کدهای خود بهره ببرید. به طور کلی به کمک xacro میتوان سه کار مفید زیر را انجام داد:
تعریف ثابتها
محاسبات ساده ریاضی
تعریف ماکرو
ژانویه 22, 2020
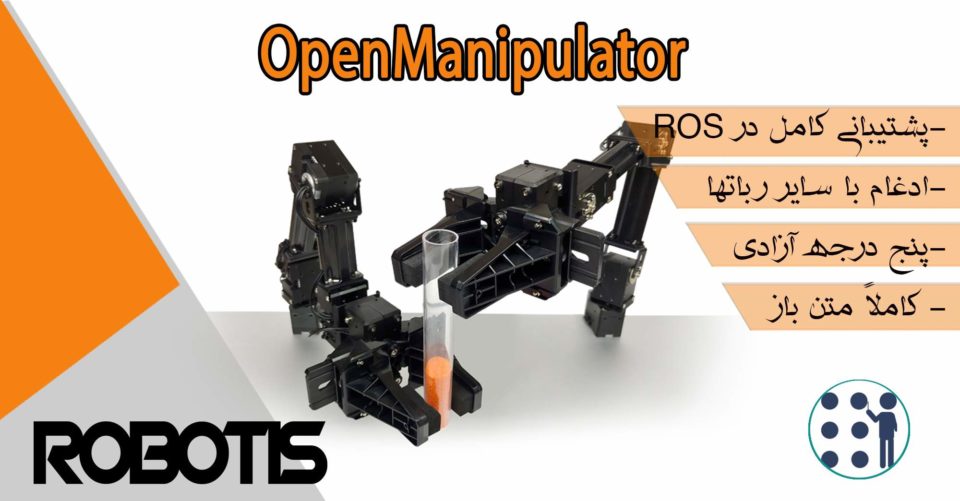
Open manipulator یک بازوی رباتیک با مفاصل دورانی و دارای 5 درجه آزادی (4 مفصل دورانی+ 1 گریپر) است که کاملاً با ROS سازگار بوده و شما میتوانید به آسانی آن را در محیط شبیهسازی اجرا کنید و الگوریتمهای مدنظر خودتان را بر روی آن پیادهسازی کنید.
نوامبر 3, 2019
برای طراحی و ساخت مدل سهبعدی ربات، رآس که به ما کمک میکنند تا یک مدل سهبعدی از ربات را با تطبیق خوبی با واقعیت ایجاد کنیم.همچنین رآس این امکان را به ما میدهد تا فایل CAD طراحی شده برای اجزای ربات خودمان را نیز به آن بدهیم تا در نمایش گرافیکی شبیهسازی از آن استفاده کند.
نوامبر 1, 2019

ربات TIAGo (تیاگو) یک ربات متحرک دارای بازو ( mobile-manipulator) است که توسط شرکت PAL Robotics ساخته شده است.
این ربات در سه مدل دوبازو، تک بازو و بدون بازو تولید میشود.قابلیتهای این ربات نظیر ناوبری، ادراک، برداشتن و گذاشتن اجسام، ادراک متقابل، شناسایی حرکت، تشخیص چهره و … اون رو به پلتفرمی مناست برای کارهای تحقیقاتی تبدیل کرده.
اکتبر 27, 2019
در این آموزش نحوه ارتباط بین MATLAB و ROS آموزش داده میشود. تنظیمات شبکه برای برقراری ارتباط، دریافت و انتشار تاپیکها در متلب، کنترل ربات توسط سیمولینک و ... مواردی است که در این آموزش ارائه شده است.
اکتبر 23, 2019

گزبو نرمافزار شبیهسازی در ROS است که امکان آزمایش سریع الگوریتمها ، طراحی رباتها، انجام تست رگرسیون، آموزش هوشمصنوعی با استفاده از سناریوهای واقعگرایانه، امکان شبیهسازی دقیق و کارآمد انواع رباتها در محیطهای پیچیده داخلی و خارجی را فراهم میکند.
سپتامبر 20, 2019

در این آموزش روش دیگری برای ارتباط بین نودها که فراخوانی سرویس (call service) نام دارد به زبان پایتون معرفی میشود.
سپتامبر 19, 2019

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
در این آموزش روش دیگری برای ارتباط بین نودها که فراخوانی سرویس (call service) نام دارد به زبان ++C معرفی میشود.