
بازوی رباتیک open manipulator
ربات OpenManipulator یک بازوی رباتیک ساده و کوچک، ساخت شرکت Robotis است که با هدف آموزش ROS تولید شده است. Robotis یک شرکت کرهای فعال در زمینه ROS است.


ربات OpenManipulator یک بازوی رباتیک ساده و کوچک، ساخت شرکت Robotis است که با هدف آموزش ROS تولید شده است. Robotis یک شرکت کرهای فعال در زمینه ROS است.
Robotis حتی اگر به خاطر سرویسهای Dynamixel شناخته شده باشد ، به دلیل داشتن ربات Turtlebot 3 و Open manipulator امکان ورود آسان تر به ROS را فراهم کرده است.
Open manipulator یک بازوی رباتیک با مفاصل دورانی و دارای ۵ درجه آزادی (۴ مفصل دورانی+ ۱ گریپر) است که کاملاً با ROS سازگار بوده و شما میتوانید به آسانی آن را در محیط شبیهسازی اجرا کنید و الگوریتمهای مدنظر خودتان را بر روی آن پیادهسازی کنید.
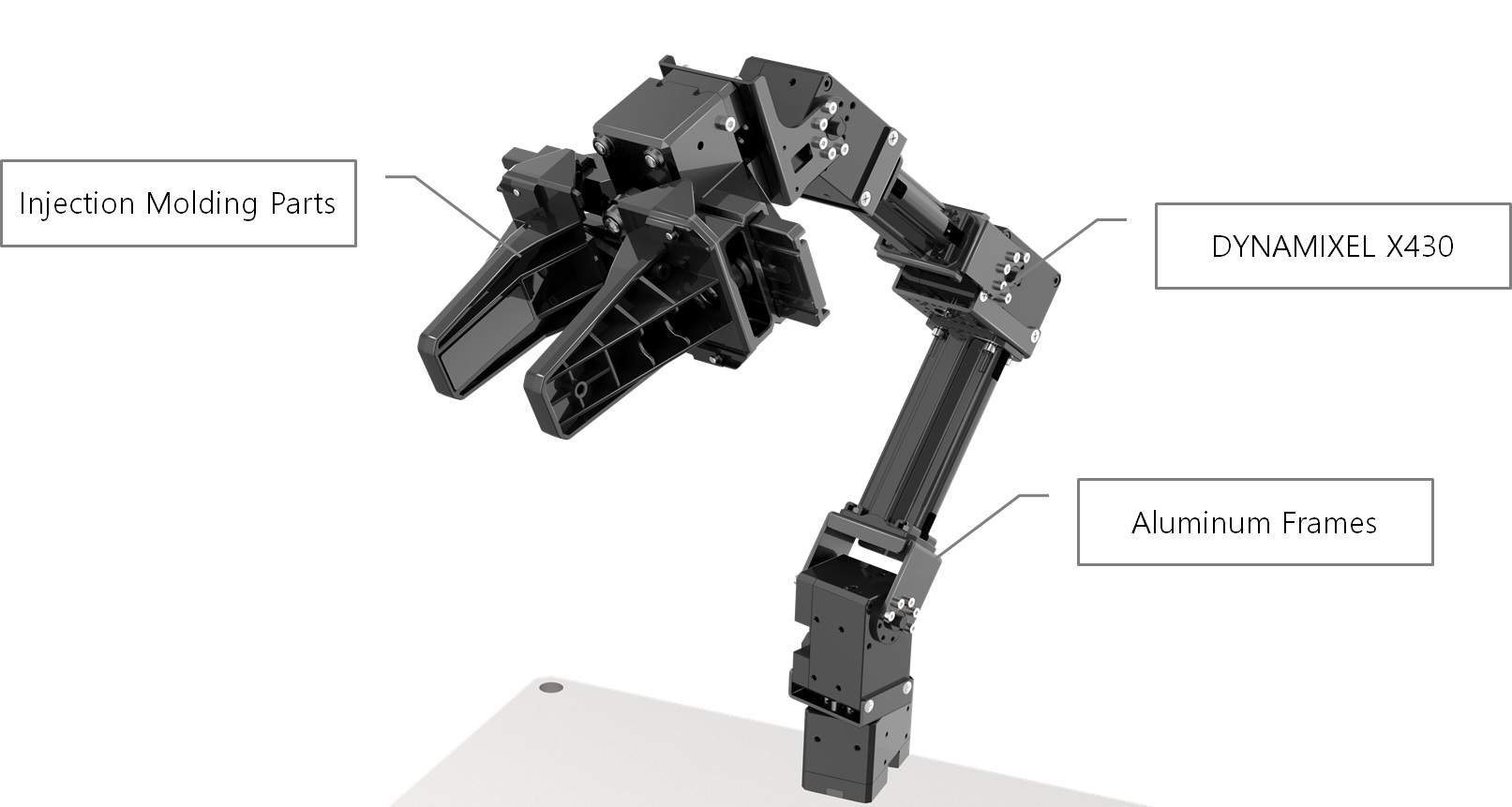
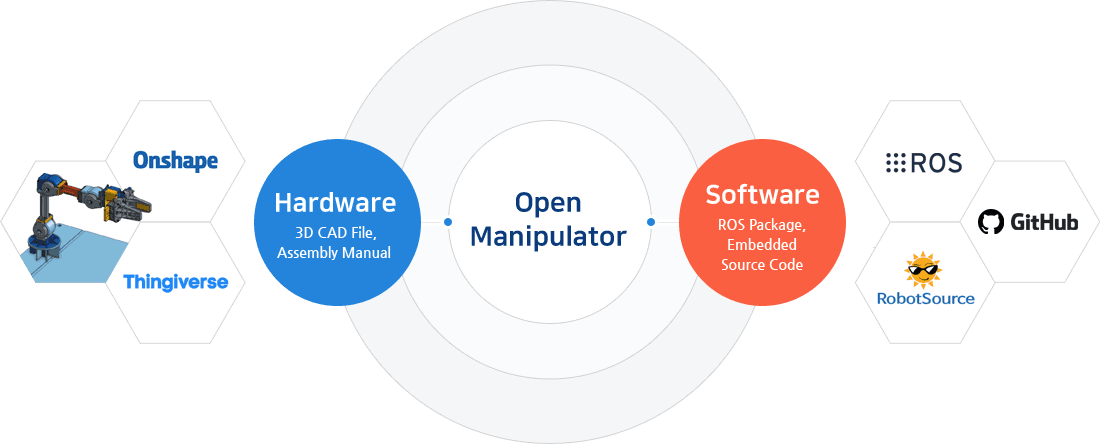
در این رباتها از سروو موتورهای Dynamixel استفاده شده است و شما میتوانید تمام قطعات این ربات را خودتان مونتاژ کنید. شما میتوانید به فایل CAD ، سخت افزار، نرمافزار و سورس کدهای توسعه این ربات دسترسی داشته باشید و حتی آن را برای ربات خودتان شخصی سازی کنید.
شما با استفاده از این ربات قادر خواهید بود تا بسیاری از مفاهیم پرکاربرد در رباتهای سری از جمله سینماتیک مستقیم، سینماتیک معکوس، کنترل مفصل، طراحی مسیر و …. را به آسانی یاد بگیرید. علاوه بر این شما میتوانید با استفادهاز این ربات با سایر قابلیتهای ROS نظیر moveIt! کار با سنسورهای بینایی و … نیز آشنا شوید.
در جدول زیر سایر ویژگیهای این ربات آورده شده است.
| Model Name | RM-X52 | |
| Actuator | – | XM430-W350-T |
| Input Voltage | V | ۱۲ |
| DOF | – | ۵ (۴ DOF + 1 DOF Gripper) |
| Payload | g | ۵۰۰ |
| Speed(Joint) | RPM | ۴۶ |
| Weight | kg (lb) | ۰٫۷۰ (۱٫۵۴) |
| Reach | mm (in) | ۳۸۰ (۱۴٫۹) |
| Gripper Stroke | mm (in) | ۲۰~۷۵ (۰٫۷۹~۲٫۹۵) |
| Communication | – | TTL (Level Multidrop BUS) |
| Software | – | ROS, DYNAMIXEL SDK, Arduino, Processing |
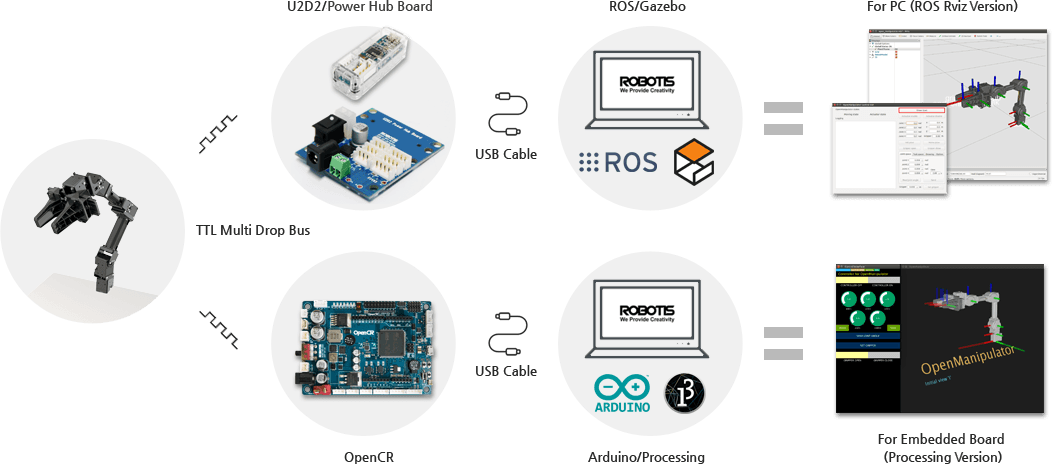
OpenManipulator را میتوان به دو صورت برنامه ریزی کرد.
در این حالت شما میتوانید با اتصال ربات واقعی از طریق رابط U2D2 به کامپیوتر خود و نصب پکیجهای موردنیاز به صورت همزمان ربات را کنترل کنید و همچنین آن را در محیط Rviz نیز مشاهده کنید. در این حالت تمامی محاسبات در کامپیوتر شما و در ROS انجام میشود و برد رابط تنها برای تبدیل سیگنالهای کنترلی ارسالی از PC به سیگنالهای مورد استفاده سروو موتورهای داینامیکسل میباشد.
در این حالت شما یک embedded برد نظیر openCR دارید که پردازشهای اصلی درون آن انجام میشود و شما میتوانید از طریق ابزارهایی نظیر Arduino IDE الگوریتمهای خودتان را برنامه ریزی کنید. در این حالت دستورات را می توان با استفاده از برنامه GUI رایانه شخصی ، کنترلر جوی استیک یا یک سنسور ساده به برد ارسال کرد. برای اجرای این حالت نیز لازم است تا با اتصال openCR به کامپیوتر یکسری تنظیمات اولیه انجام شود.
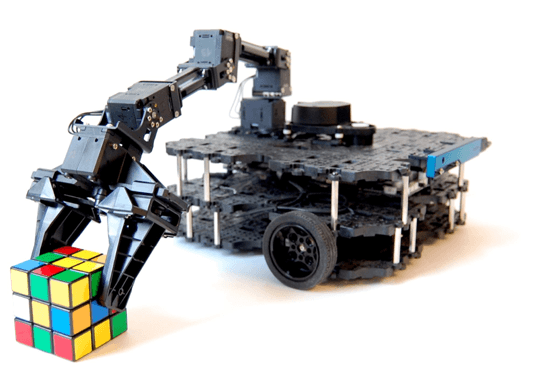
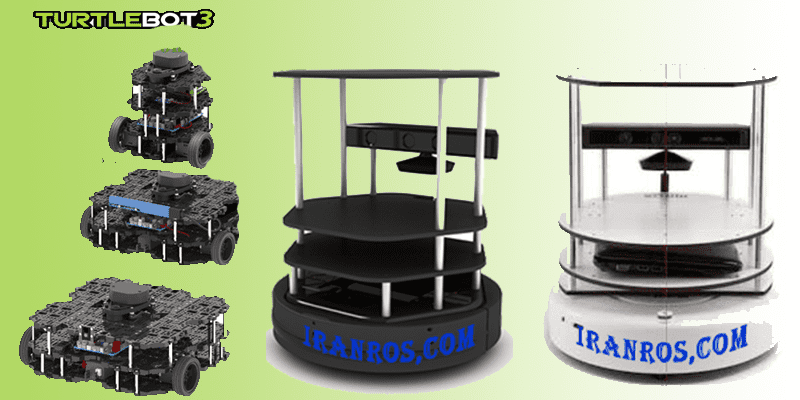
همانطور که گفته شد، میتوان openmanipulator را با رباتهای دیگر نظیر رباتهای سیار ترکیب کرد. در زیر چند نمونه از رباتهایی که از openmanipulator به عنوان یک بازوی رباتیک استفاده کرده اند را مشاهده میکنید.



{kind=link}
{kind=link}