



مفهوم Topic در ROS: در آموزشهای قبلی شما با مفهوم نود بهخوبی آشنا شدید، حال میخواهیم به مبحث تاپیک به پردازیم. ربات A ذکرشده در بحث قبل را به یاد بیاورید. اگر در خاطر داشته باشید، بیان شد که نود کنترل موقعیت ربات با نود کنترل سرعت ربات در ارتباط است.
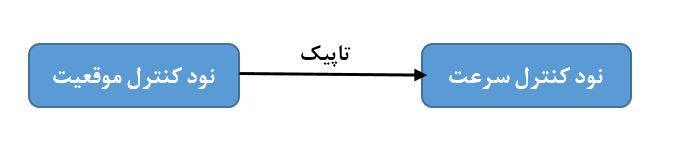
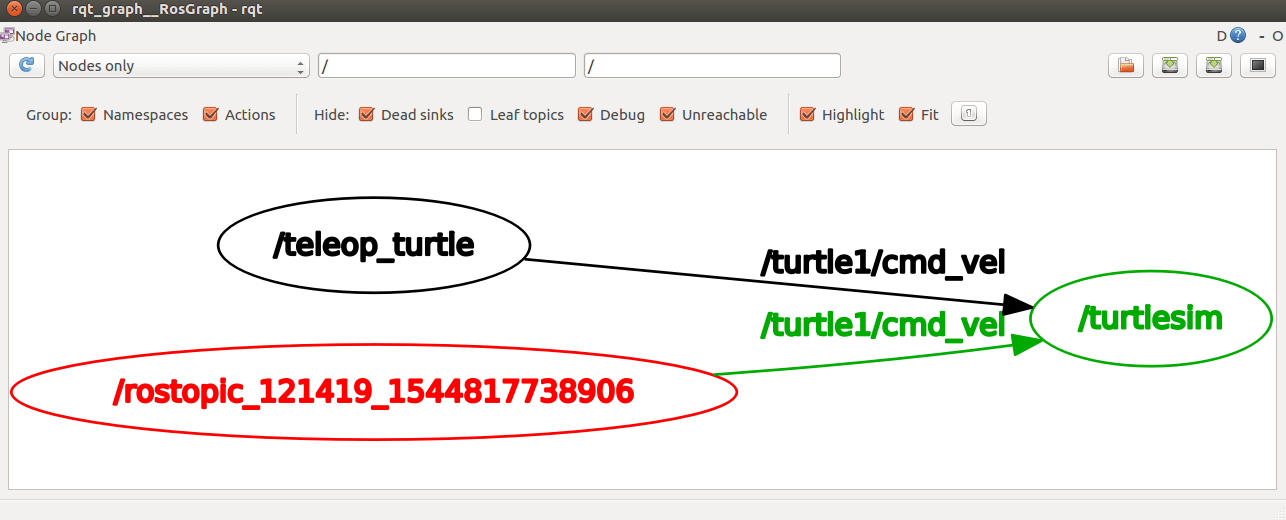
درواقع نودها با استفاده از Topic ها در ROS با هم در ارتباط هستند. در شکل زیر نود کنترل موقعیت با نود کنترل سرعت با هم در ارتباط هستند در این صورت این رابط تاپیک نامیده میشود.



{kind=link}
{kind=link}
{kind=link}