اگر به پنجره اضافه نمودن نمایشگر دقت کرده باشین یکسری مدل هایی به صورت پیش فرض تعریف شده هستند و ما می توانیم از آنها استفاده کنیم. البته می توانیم مدل های دلخواه خود را نیزاضافه نماییم که در ادامه به این موضوع نیز پرداخته خواهد شد.
دستگاههای مختصات در RVIZ
rviz از سیستم تبدیل tf برای تبدیل داده ها از دستگاه مختصات وارد شده به یک دستگاه مرجع جهانی استفاده می کند. باید بدانید که در Rviz دو دستگاه مختصات وجود دارد، که این دستگاه های مختصات، دستگاه مختصات ثابت (Fixed Frame) و دستگاه مختصات هدف (Target Frame) است.
دستگاه مختصات ثابت
دستگاه مختصات ثابت، یک دستگاه مختصات مرجعی اسات که برای نمایش نقشه ها، و یا دنیای واقعی یا چیزهایی شبیه این استفاده می شود. اما می توان از دستگاه مختصات اودومتری هم برای این منظور استفاده نمود.
در صورتی که دستگاه مختصات ثابت به اشتباه تنظیم شود، به عنوان نمونه برروی پایه ربات تنظیم شود، تمام اشیائی که ربات تاکنون دیده است، در مقابل ربات، در موقعیتی نسبت به ربات که در آن تشخیص داده شده است، ظاهر می شود. اگر دستگاه مختصات ثابت را تغییر دهید ، تمام داده هایی که در حال حاضر نشان داده میشوند به جای تغییر شکل مجدد، پاک می شوند.
دستگاه مختصات هدف
دستگاه مختصات هدف، یک دستگاه مرجع برای نمایش نمای دوربین در Rviz است. به عنوان مثال در صورتی که شما دستگاه مختصات هدف را نقشه قرار دهید. ربات را که در اطراف نقشه حرکت می کند را مشاهده خواهید کرد. اگر دستگاه مختصات هدف شما ربات باشد، آنگاه ربات ثابت می شود و همه چیز نسبت به ربات حرکت می کند.



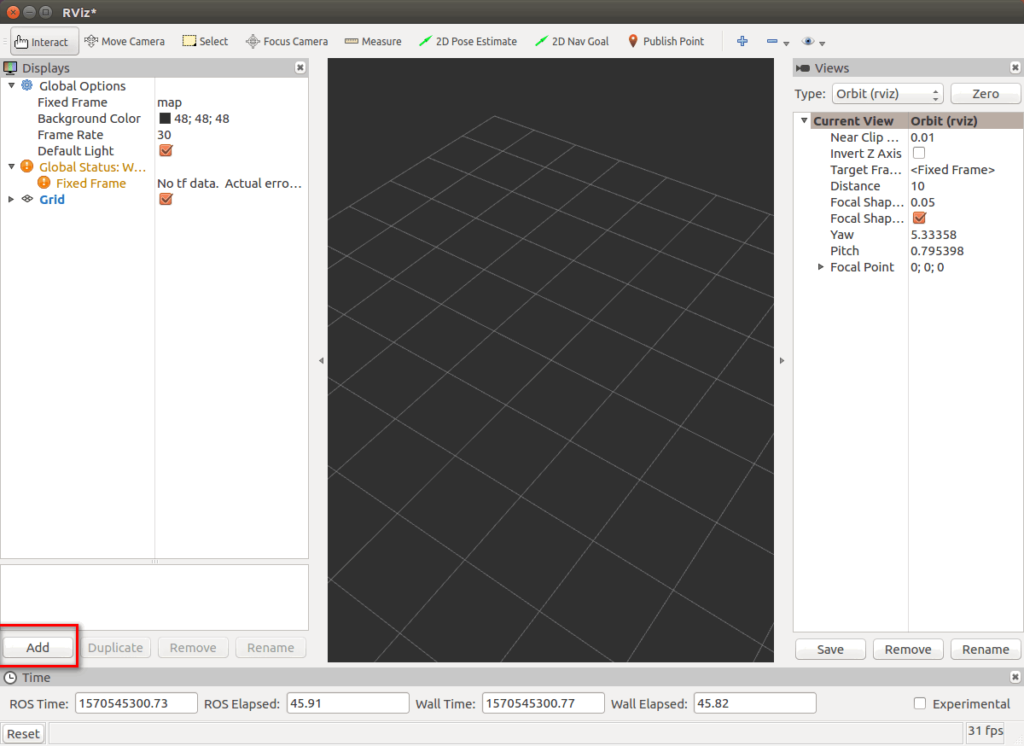
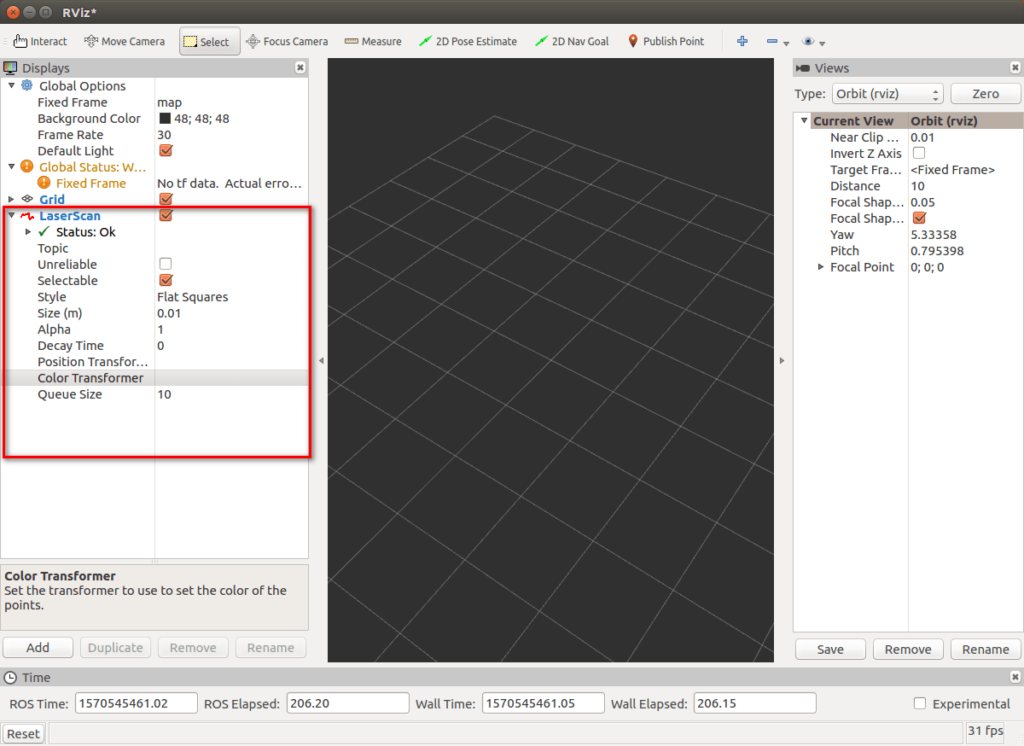
![نمایشگر سه بعدی نرم افزار RVIZ ارویز نرم افزار ارویز ROS ريالؤ]ة RVIZ](http://wiki.iranros.com/wp-content/uploads/2019/10/RVIZ-ROS-iranros.com-min-1024x746.png)


{kind=link}
{kind=link}