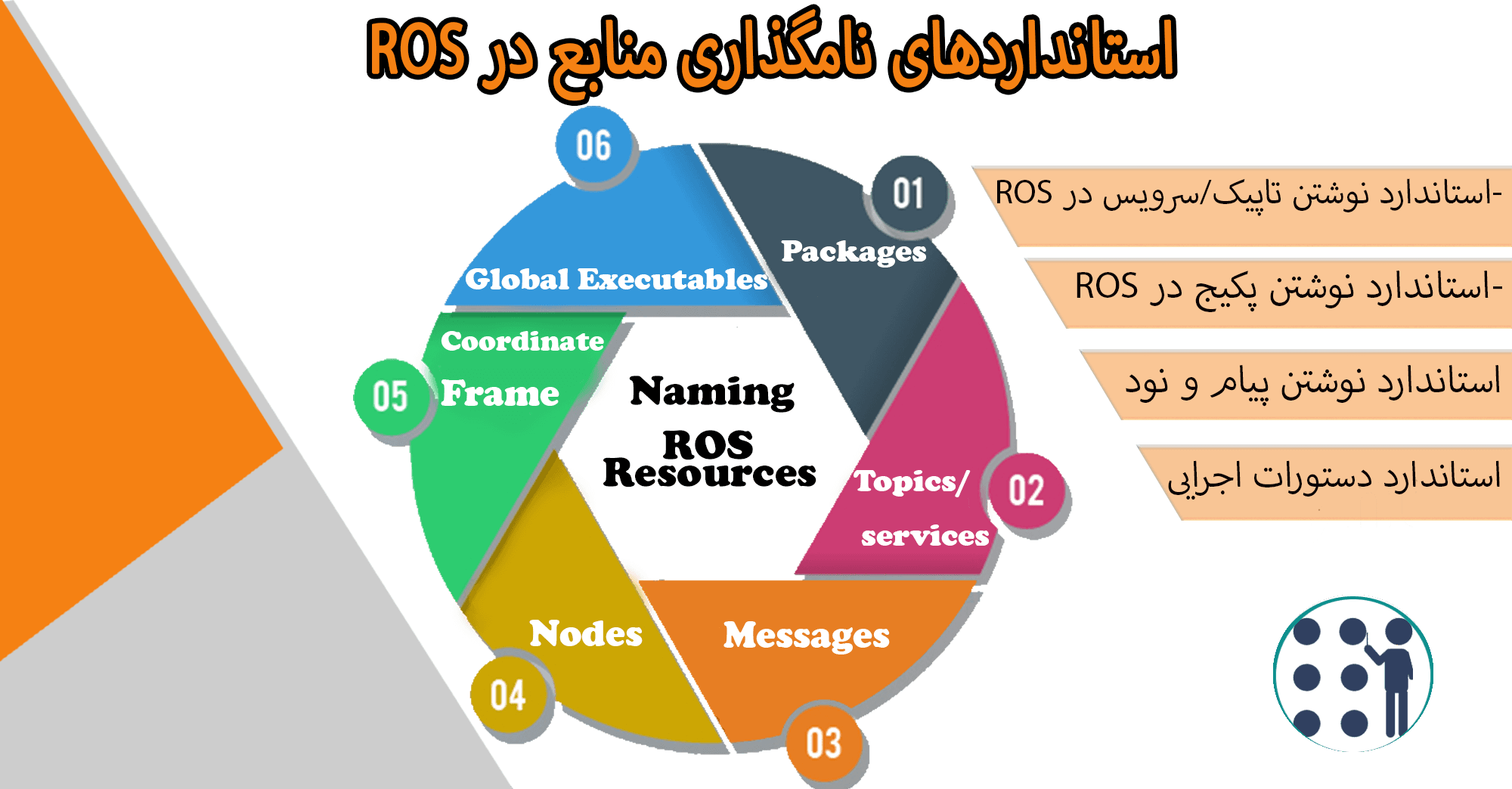
نودها
قبل از اینکه وارد اصول برنامه نویسی صحیح برای نود شویم. لازم است تا بدانیم که هر نود دارای دو بخش اصلی است که باید با استاندارد مطابق باشد بخش اول نام و بخش دوم نوع آن است.
۱-نوع ، نام اجرایی برای فایل لانچ آن نود است.
۲-نام ، همان چیزی است که هنگام راه اندازی به نودهای دیگر ROS منتقل میشود.
این دو مفهوم را باید از یکدیگر جدا در نظر گرفت. دلیل اصلی آن این است که نامها باید منحصر به فرد باشند. در حالی که ممکن است نودهای مختلفی از یک نوع وجود داشته باشد.
در صورت امکان ، نام پیش فرض نود باید مانند نام فایل لانج استفاده شده برای نود باشد. این نام پیش فرض را می توان در هنگام راه اندازی به چیزی منحصر به فرد انتقال داد.
نام نوع نود
به طور کلی، اسامی نوع نود را باید کوتاه در نظر گرفت، زیرا آنها در نام پکیج قرار دارند.
به عنوان مثال، اگر پکیج laser_scan شما بیننده ای برای اسکنهای لیزری دارد ، به سادگی آن را به عنوان view بنامید(به جای laser_scan_viewer).
بنابراین ، هنگامی که شما آن را با rosrun اجرا می کنید ، تایپ می کنید:
[sourcecode language="plain"]
rosrun laser_scan view
[/sourcecode]




{kind=link}
{kind=link}